Sangbeom Park

I am currently developing controllers for humanoid robots using reinforcement learning at UROBOTICS, focusing on learning robust and generalizable control policies for complex and dynamic behaviors.
I completed M.S. in AI at Korea University, where I was advised by Prof. Sungjoon Choi, and B.S. in Electronic and Electrical Engineering with a minor in Intelligent Robot Engineering.
My professional experience includes work at LG EnergySolution, where I researched learning–based controllers for quadrupedal robots such as SPOT in industrial environments to enable autonomous patrol tasks. Also I was a Co-Founder and Head of Software at ATLO, where I led the development of AI agents, including ATTO and DITTO.
Previously, I completed internships at NAVER LABS, where I worked on safe skill learning for Mini-Cheetah, a quadruped robot and large vision-language models for robotics applications, and at NAVER CLOUD, where I implemented AI NewsBot, a news curation system powered by HyperCLOVA X.
publications
-
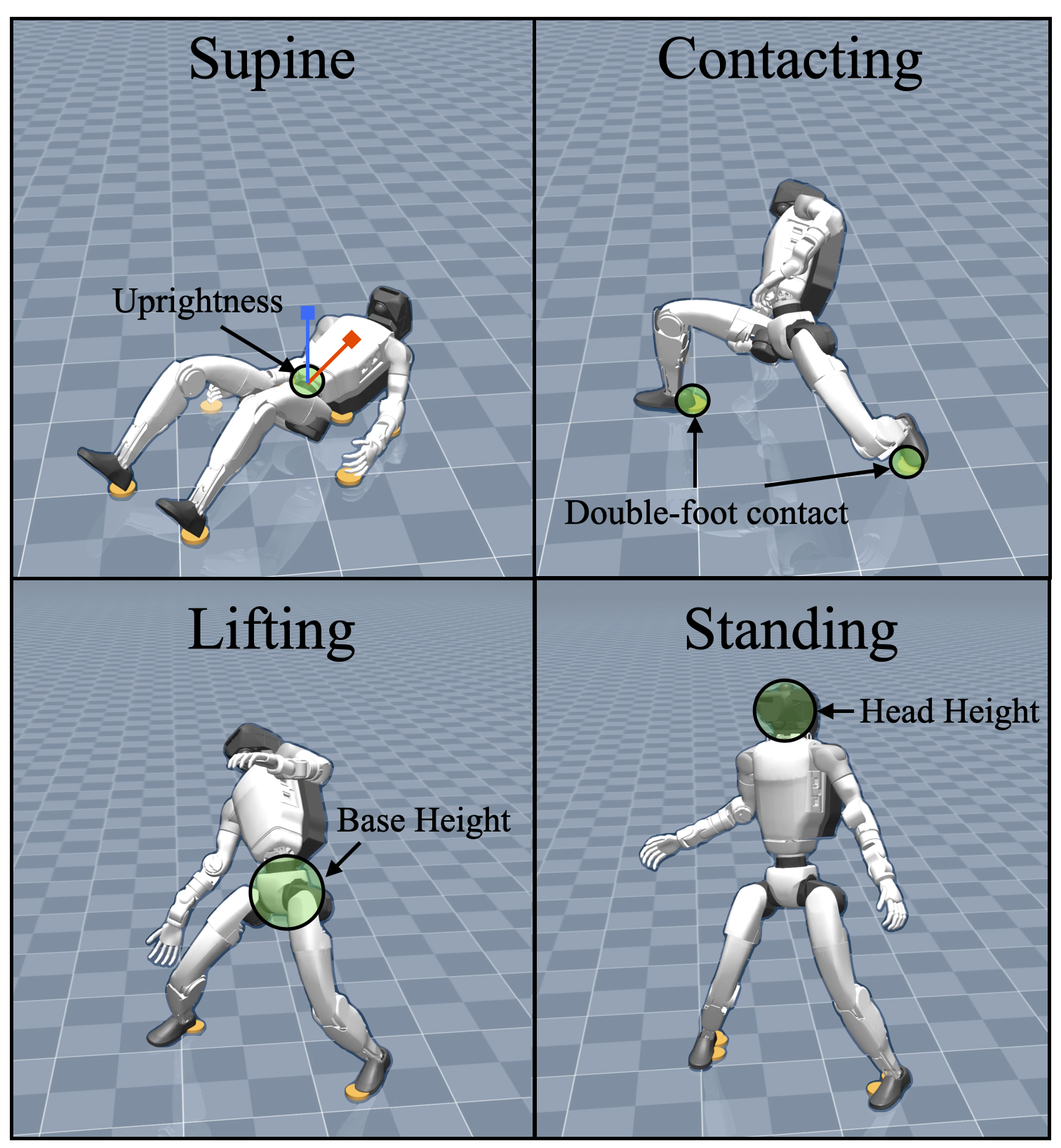 Contact-Staged Stand-up Learning for Humanoids under Shifted Center-of-Mass ConditionsICRA Workshop on Contact-Rich Control and Representation, 2026
Contact-Staged Stand-up Learning for Humanoids under Shifted Center-of-Mass ConditionsICRA Workshop on Contact-Rich Control and Representation, 2026 -